Equipo visual
- Reflector grande y reflector pequeño de señales.
- Lámpara Aldis.
- Luces de marcha.
- Señales de semáforo y banderas.
- Pistola de señales estrella.
- Bengalas.
El reflector grande, de 24V, estaba alimentado por el transformador ubicado en la sala de control, desde el convertidor de TDC instalado en la sala de torpedos de popa.
Los interruptores estancos y puntos de luz están instalados en la torre de mando.
La señal de luz de búsqueda de 24V se alimenta de la misma manera. La salida estanca y resistente a la presión está instalado en el puente, uno más estanco de salida se instala en la torre. Los interruptores para ambas salidas se encuentran en la torre de mando.
Hay instaladas además las siguientes luces de funcionamiento: luz humeante, laterales y de popa. Estas luces están controladas por medio de la llave situada en la torre. Ambas luces de popa se proporcionan con una resistencia de atenuación situada en la torre de mando, con un interruptor de control y una lámpara indicadora.

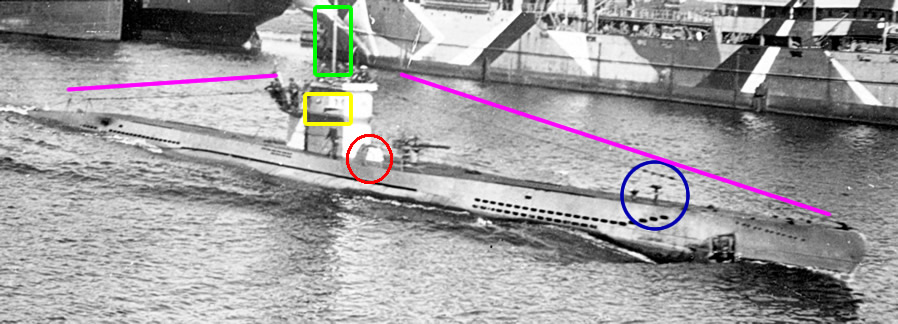
En la imagen podemos apreciar la utilización de la lámpara de
señales. En primer plano (a la derecha) podemos ver
el soporte y la brújula