Dispositivos activos submarinos (Sonda, Sonar) |
| Antecedentes |
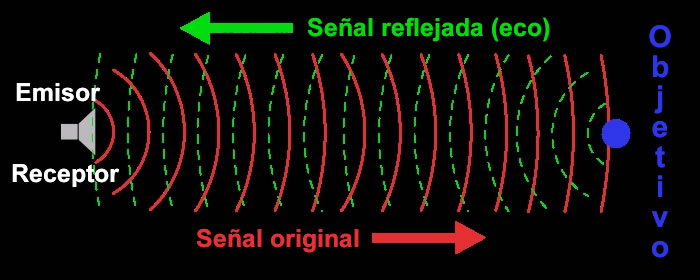
En el siglo XIX se llevaron a cabo varios experimentos para determinar la profundidad del Océano mediante una señal acústica. Esta señal era producida por un transductor situado debajo del agua (en la quilla) y se calculaba cuanto tiempo tardaba la señal en rebotar en el fondo y regresar al punto de origen donde era captada por otro transductor. Hubo un suceso que impulsó las investigaciones para fabricar un sonar "horizontal", el hundimiento del Titánic el 15 de Abril de 1912. No había pasado un mes desde el desastre del Titánic (el 10 de Mayo) cuando el Inglés Lewis Richardson presentó la patente de lo que debía ser un aparato emisor de señales ultrasónicas y un receptor para captar los ecos (Patente entrada en la “British Patent Office” el día 27 de marzo de 1913 con el número 11.125). La idea era buena aunque todavía no existía la tecnología para llevarla a cabo. "Magnetostricción": Deformación en algunos materiales cuando son atravesados por un campo magnético Por lo tanto podemos distinguir dos equipos que funcionando bajo el mismo concepto sirven para cosas diferentes. Tenemos la sonda, para determinar la profundidad y el “sonar” (denominación inglesa del dispositivo pero que solemos utilizar comúnmente) para determinar la distancia a un objetivo. |
|
Como ya hemos visto en el apartado dedicado a los Hidrófonos, en la primera guerra mundial ya existían dispositivos de escucha pasivos, pero estos hidrófonos no podían determinar la distancia exacta a la que se encontraba el objetivo. Incluso los sumergibles británicos disponían de un sistema de sonar que les permitía detectar la posición de las minas en un campo minado. Como sabemos, las frecuencias bajas se captan a mayor distancia que las frecuencias altas, pero también se necesitan equipos más complejos (y más grandes) para captarlas. En condiciones ideales un sumergible equipado con el sistema Kündhold en silencio podía detectar a un buque de gran tamaño a una distancia de entre 5.000 y 10.000 metros. Por otra parte los destructores podían detectar a un sumergible a una distancia de entre 3.000 y 5.000 metros. |
Evolución |
El peligro de que un sumergible utilizara el sonar activo era enorme, ya que sus señales podían (y eran) captadas por el buque enemigo antes incluso de que el propio sumergible hubiera detectado al buque enemigo. Por este motivo, en la Kriegsmarine se dio la orden de buscar primero utilizando el GHG-Angale (hidrófono) y determinar la posición del enemigo. Una vez conocida la posición del buque enemigo se utilizaría el Mob-S-Gerät para determinar su distancia exacta. Esto permitía que, en teoría, con pocos impulsos (en condiciones idóneas incluso con sólo uno) se pudiera determinar la distancia y de este modo minimizar el riesgo de ser detectados. |
 |
 |
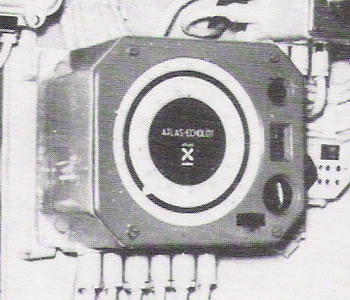
En las fotos de arriba vemos dos unidades de la sonda (tiefenlotanlage) fabricada por la marca Atlaswerke, el "Atlas-Echolot". El de la izquierda pertenece a un uboot del Tipo VIIc (el U98) y el de la derecha a un Uboot del Tipo IXc (el U190). Ambos son prácticamente idénticos. A partir del “Mob S-Gerät” que utilizaba dos impulsos, se desarrolló el “S-Gerät” que utilizaba cuatro impulsos y reducía el haz emitido a una franja de 15 a 20 grados lo que lo hacía más preciso. La señal recibida era representada en un tubo de rayos catódicos (similar a un osciloscopio) de 9 cm. de diámetro (Braun tube). Esta señal era proyectada, mediante un dispositivo inclinado, a un espejo semitransparente donde el operador podía interpretarla y podía seleccionar distintas escalas de distancias que también se reflejaban en el espejo. Este dispositivo sólo fue instalado en un Uboot, en el U43 (tipo IX). Nunca sería instalado en un tipo VII, aunque en el desarrollo del Tipo VIIb se tuvo en cuenta la instalación del S-Gerät. Un ejemplo que todos conocemos del efecto Doppler es oír la sirena de una ambulancia, el sonido que oímos va variando a medida que la ambulancia se acerca, pasa a nuestro lado y se aleja. El tono (la frecuencia) va variando. Una evolución más avanzada del S-Gerät fue el Nibelung que sería probado por primera vez en un uboot del Tipo VIIc, el U1008. Este sistema (inicialmente desarrollado para el Tipo VIIc/42) debía instalarse en los uboote de los tipo XXI y XXIII y permitiría la localización del enemigo y el lanzamiento de torpedos desde una profundidad de unos 50 metros. |
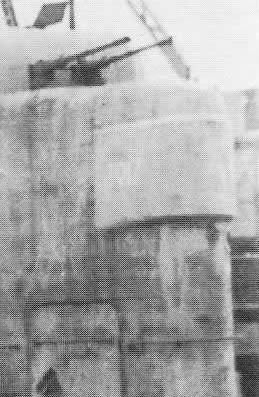
A finales de la guerra estaban en desarrollo varios sistemas (Sarotti, Most y Hildebrand) que debían aumentar la localización panorámica del S-Geräte y del Nibelung (limitada inicialmente a un arco de 100 grados). La investigación y desarrollo de los sistemas de recepción activos submarinos era responsabilidad del Nachrichtenmittelversuchsanstalt (NVA) que posteriormente, el 8 de Septiembre de 1939, pasó a llamarse Nachrichtenmittelversuchskommando (NVK) y era un departamento del OKM/Amtsgruppe Technisches Nachrichtenwesen (OKM/Nwa). Los aparatos eran construidos por Electroakustik GmbH de Kiel y en Atlaswerke en Bremen. Eran instalados en los astilleros, donde había departamentos especiales dedicados a su montaje y ajuste, siguiendo las directrices dadas por el OKM. En la fotografía de la derecha (de la torreta del U3017) puede apreciarse la carcasa del "Nibelung". |
 |
| En 1943 el departamento de investigación de la Kriegsmarine pasaría a estar supervisado por el profesor Küpfmüller que puso todos sus esfuerzos en todo lo relacionado con los sistemas de detección submarina. | |
|
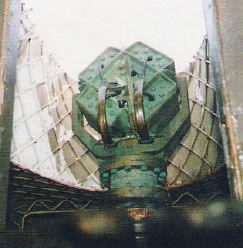
Hubo una gran colaboración entre todos los departamentos de la Kriegsmarine y con las fábricas de Kiel y Bremen (Electroakustik GmbH y Atlaswerke) en parte gracias a la fuerte personalidad del profesor Küpfmüller. Los sistemas de detección submarina alemanes estaban un paso por delante al inicio de la Segunda Guerra Mundial y lo seguirían estando durante toda la contienda. A la izquierda el "Sonar" del Wilhelm Bauer (ex-U2540) aunque no es el original, nos da una idea de como era. Se aprecia perfectamente la base rotatoria que servía para "dirigir" los impulsos del Sonar. |
| Ampliación: Ecosonda o sonar de profundidad |
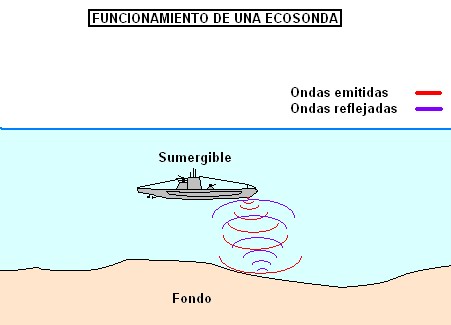
Se denomina ecosonda al escandallo de ultrasonido que aprovecha la reflexión de las ondas en el fondo marino o de los obstáculos que se interponen durante su difusión en el medio marino. |
Antecedentes |
Desde los inicios de la navegación el desplazarse por aguas poco profundas constituia un riesgo por cuanto en zonas de poco calado o lugares en los que el fondo iba disminuyendo, el peligro de varada o colisión con esos fondos con el riesgo añadido de naufragio era muy frecuente y a veces con resultados catastróficos, se imponía la necesidad de conocer el calado cuando un buque se acercaba a la costa para evitar ir a parar a un banco de arena, un arrecife, una roca, una aguja con los consiguientes perjuicios que ello podía ocasionar tanto al buque como a su carga y tripulación es por ello que se inventa es escandallo |
Ecosondas en los sumergibles alemanes |
Los sumergibles alemanes disponían de ecosonda para determinar la profundidad existente por debajo de la quilla. |
 |
El Dispositivo Echolot |
Echolot era el nombre de la ecosonda usada por los sumergibles alemanes durante la segunda guerra mundial Estos equipos electrónicos eran suministrados/alimentados con una corriente eléctrica alterna a 1500 Hertzios, que era producida por un alternador dedicado a suministrar la potencia necesaria a los transmisores a la frecuencia de trabajo, que era 3 Kilohertzios. |
 |
 |
Estaba situado en la Central sobre una mesa al lado del potabilizador de agua (ver la foto superior) |
En las siguientes imágenes vemos las cajas y el interior de un amplificador de una ecosonda (Tieflotvestärker) alemana y sus componentes. |
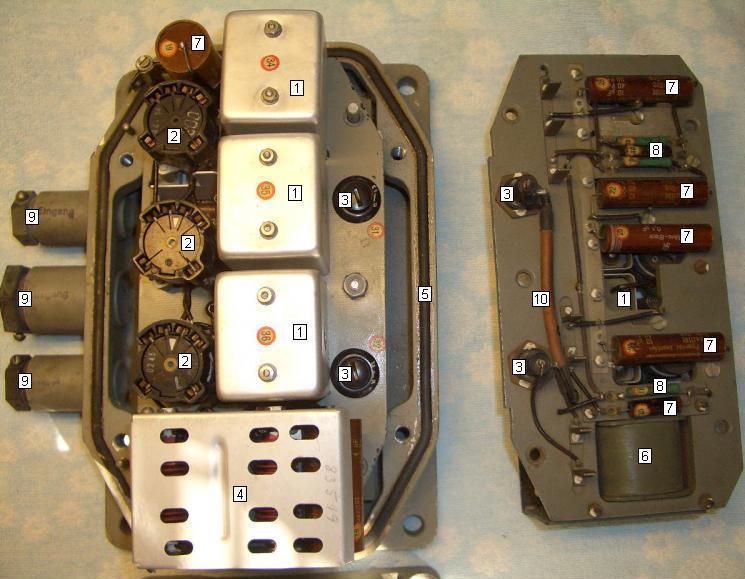 |
1.- Carcasa metálica que cubre las bobinas de Alta Frecuencia y los apantalla o blinda magnéticamente entre sí, con el fin de evitar las inducciones mutuas, 2.- Zócalos o bases para las válvulas amplificadoras, 3.- Cápsulas para fusibles, 4.- Caja y rejilla disipadora de la fuente de alimentación, 5.- Junta de goma tórica, 6.- Transformador de alimentación, 7.- Condensador, 8.- Resistencias, 9.- Pasantes de cable tipo "sici", 10.- Diodos rectificadores de la fuente de alimentación (en ésta foto no se ven), |
 |
 |
1.- Carcasa metálica que cubre las bobinas de Alta Frecuencia y los apantalla o blinda magnéticamente entre sí, con el fin de evitar las inducciones mutuas, 2.- Zócalos o bases para las válvulas amplificadoras, 3.- Cápsulas para fusibles, 4.- Caja y rejilla disipadora de la fuente de alimentación, 5.- Junta de goma tórica (en ésta foto no se ve), 6.- Transformador de alimentación, 7.- Condensador, 8.- Resistencias (en ésta foto no se ven), 9.- Pasantes de cable tipo "sici" (en ésta foto no se ven), 10.- Diodos rectificadores de la fuente de alimentación (los diodos parecen ser del tipo MOS > metal oxido semiconductor) |
 |
Apartado dedicado a la ecosonda o sonar de profundidad realizado por José A.R. Mediavilla y Juan Jaramillo Blasco. Desde U-Historia queremos agrader a ambos su colaboración. |