
| Dispositivos pasivos submarinos (Hidrófonos) |
Todos los buques producen sonidos cuando navegan, incluso estando parados emiten ruidos, esos pueden ser producidos por las hélices, los motores, y toda la maquinaria que hay abordo de un buque (bombas de achique...). Estos sonidos (ruidos) se propagan en el agua, ya sea directamente el ruido producido por las hélices o de la maquinaria a través del casco, en todas las direcciones y pueden ser captados a gran distancia. C= 1410 + 4.21t – 0.037t² +11s + 0.018d Donde C es la velocidad del sonido (en metros por segundo) t es la temperatura (en grados Celsius) s es la salinidad y d es la profundidad del agua (en metros). |
| Antecedentes |
Durante la Primera Guerra Mundial los sumergibles alemanes (uboote) estaban equipados con los denominados “Geräuschemptangern” (micrófonos de carbón, parecidos a los utilizados en los teléfonos antiguos). Estos micrófonos estaban situados en diferentes sitios a lo largo del casco para de este modo poder captar el ruido producido por las hélices de los buques. La dirección de procedencia del sonido captado se determinaba conectando o desconectando individualmente los micrófonos (o varios de ellos) se trataba pues de un primitivo hidrófono. En 1918 la Kaiserliche Marine patentaría un dispositivo con el que se podía determinar la localización y procedencia del ruido captado, al estilo de un radiogoniómetro. (Reichspatentamt, Nr.320/29 de Agosto de 1918, “Verfahren sur Richtungsbestimmung van Schallsignalen”). Ya existía un sistema para “visualizar” mediante un dial circular la procedencia del sonido (aunque muy primitivo) que luego sería mejorado por el grupo Horch y denominado GHA o GHG (Gruppen Horch Gerät) aunque no lograría cumplir con las expectativas creadas, que eran las de abarcar el mayor rango de frecuencias posible, y que durante muchos años no sería modificado a pesar de sus limitaciones. El dispositivo todavía no podía determinar la distancia. Explicar brevemente que un transductor es un dispositivo electrónico que permite transformar un tipo de energía en otro. Un ejemplo es un micrófono. |
|
En cooperación con la Kaiserliche Marine, las empresas Atlaswerke A.G. de Bremen y la Electroacustik de Kiel empezaron a trabajar con los transductores piezoeléctricos (micrófonos piezoeléctricos) y en el desarrollo de equipos de detección y escucha en general. En un sistema formado por varios transductores (hidrófono) es necesario agrupar los transductores de manera que puedan captar toda la gama de frecuencias. Hay dos maneras de agruparlos:
Los dos sistemas serían utilizados en los uboot de la Segunda Guerra Mundial. En el primero de ellos el sistema estaba instalado en la cubierta y era muy vulnerable a los ataques con cargas de profundidad. El segundo de ellos estaba instalado a proa en la parte inferior del casco siendo más robusto y efectivo. |
| Kristall Dreh Basis Geräuschpeilage (KDB) |
Este hidrófono consistía en un grupo de seis transductores montados en línea recta y separados unos 8 cm. Esto formaba una superficie de recepción horizontal de unos 50cm de longitud. Más tarde el grupo de transductores (denominados Streifengruppe) aumentaron en número y se montaron agrupados en unas placas de unos 36cm de longitud y 4 cm. de altura. A más transductores mayor recepción y precisión. La base del hidrófono se hacia girar manualmente o por control remoto y de este modo la fuente del sonido podía determinarse con una precisión de varios grados en condiciones óptimas. Mediante unos filtros eléctricos era posible eliminar las bajas frecuencias y de este modo determinar con mayor claridad los ruidos de más alta frecuencia. Las hélices que giran más rápido, por ejemplo las de los buques de guerra, emiten un sonido de más alta frecuencia (agudo) que las de los mercantes que navegan más lentos y sus hélices son más lentas produciendo un sonido de más baja frecuencia (grave o bajo). |
 |
Los hidrófonos KDB inicialmente fueron diseñados para ser instalados en buques de superficie, pero también serían utilizados en los sumergibles. Especialmente eran muy efectivos en localizar a otros sumergibles. A causa de que el ruido producido por el propio roce del agua aumenta al aumentar la velocidad del sumergible el hidrófono KDB sólo era efectivo a velocidades más bajas de 6 nudos. Estos problemas se solucionaron en parte al montar el hidrófono dentro de una estructura hidrodinámica. |
 |
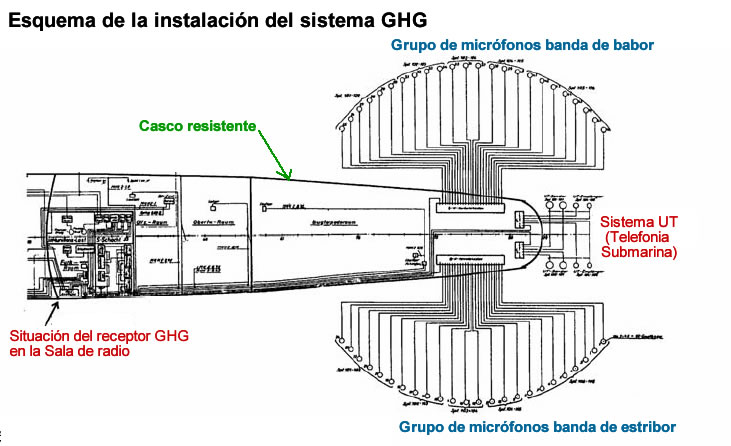
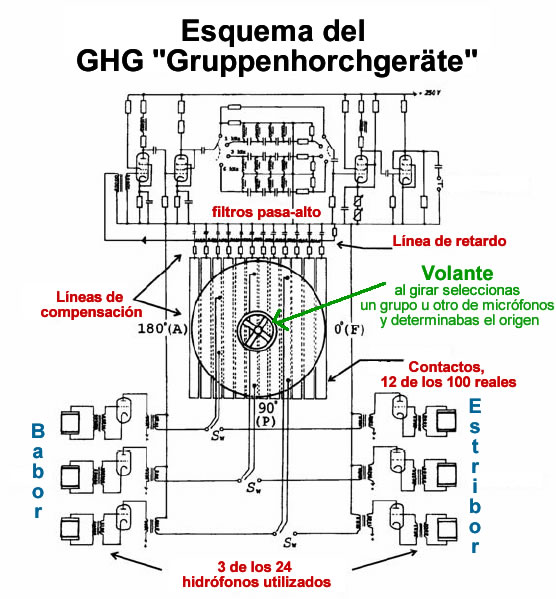
| Gruppen Horch Geräte Anlage (GHG) |
El problema de obtener una buena recepción navegando a alta velocidad sólo podía solucionarse instalando los grupos de receptores fijos en el casco del sumergible ya sea en la proa o a lo largo de la quilla. Se utilizó una mezcla de las dos opciones. Cuando un sonido llega con un ángulo determinado este reacciona de diferente manera al chocar con una parte u otra del casco. Por ejemplo, un sistema de seis receptores montados en línea recta si recibían un sonido procedente de la derecha, los transductores recibirían el sonido uno detrás del otro con una determinada diferencia de tiempo entre uno y otro. Un sistema electrónico de retraso se situaba entre los diferentes receptores y de este modo mediante un sistema de conectores que se activaban o desactivaban cuando el operario hacia girar un volante (donde una flecha indicaba la posición) era posible determinar de donde procedía el sonido. |
 |
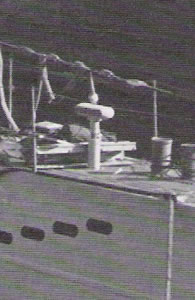
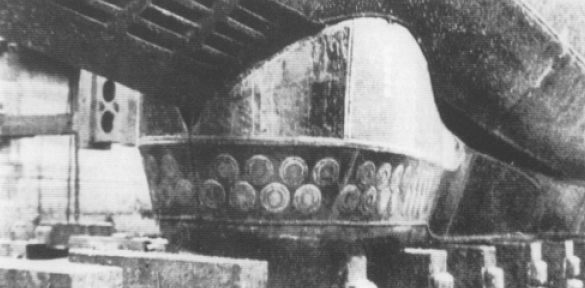
Por encima del hidroplano del U99 podemos ver el grupo de transductores del Hidrófono. Loscuatro de mayor tamaño son los transductores del sistema de telefonía submarina. |
El primer hidrófono GHG, equipado con transductores electrodinámicos, sería instalado en 1925 en varios buques de línea. Originalmente se montaban “líneas” de 2x6 o 2x12 receptores que estaban colocados en el casco a ambos lados, en la quilla, lo más lejos posible de la línea de flotación (y obviamente debajo de ella). Los primeros sumergibles equipados con el sistema GHG (en 1935) disponían de dos líneas de 12 transductores. El sistema evolucionó y en 1939 se montaban ya dos sistemas de 24 receptores. |
 |
En condiciones favorables un uboot en silencio podía captar los siguientes “ruidos”:
Por poner un ejemplo, los hidrófonos del crucero pesado Prinz Eugen detectaron al acorazado Hood a una distancia de 20 millas (37 Km). |
 |
 |
| Gruppen Horch Geräte Anlage (GHG) |
El problema de obtener una buena recepción navegando a alta velocidad sólo podía solucionarse instalando los grupos de receptores fijos en el casco del sumergible ya sea en la proa o a lo largo de la quilla. Se utilizó una mezcla de las dos opciones. El primer hidrófono GHG, equipado con transductores electrodinámicos, sería instalado en 1925 en varios buques de línea. Originalmente se montaban “líneas” de 2x6 o 2x12 receptores que estaban colocados en el casco a ambos lados, en la quilla, lo más lejos posible de la línea de flotación (y obviamente debajo de ella). |
| Evolución |
A causa de la importancia del hidrófono en los uboote se efectuaron continuas evoluciones para mejorar la calidad de los equipos. El rumbo y el nivel de ruido captado procedente del buque seguido y el efecto del sonido tras rebotar en el fondo marino eran factores que determinaban la calidad de un sistema de hidrófonos. Se tomaban constantes datos de toda clase de buques navegando a diferentes velocidades, condiciones atmosféricas, estados del mar... desde uboote en la zona de Bornholm. Estos datos eran estudiados minuciosamente para determinar cual era la mejor posición para colocar los receptores, la mejor forma del casco etc.… Todo ello era necesario para llegar a un compromiso favorable entre el ruido que era necesario escuchar y el ruido que se tenía que discriminar. |
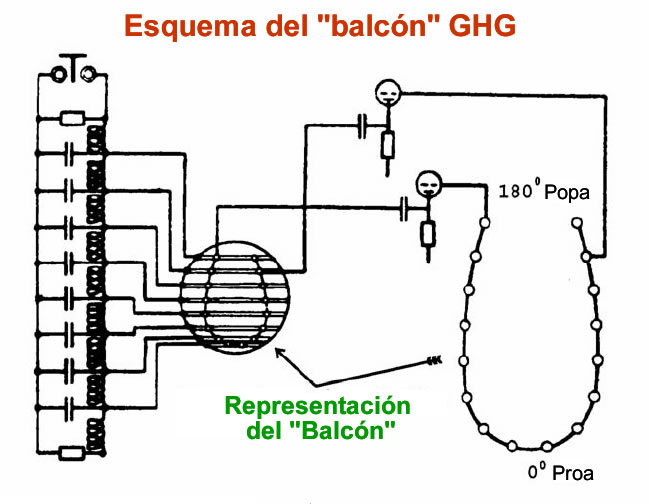
Ya avanzada la guerra se introdujo en los uboote lo que se denominó “balcón” que era una estructura donde estaban instalados los transductores. Este diseño había sido solicitado por el Oberkommando der Marine para conseguir que los uboote pudieran “oír” tanto en inmersión como estando en la superficie. En este “balcón” las dos filas de transductores estaban separadas unos 30 cm. Esta disposición permitía abarcar continuamente todas las zonas, aunque existía una zona de “sombra” situada entre los 150 y los 210 grados. |
 |
 |
El incremento de la velocidad máxima en inmersión conseguida en los submarinos de los Tipo XXI (21) y XXIII (23) y también en los submarinos Walter (Tipos XVII y XXVI) obligó a instalar el “balcón” en una posición más retrasada y que sobresaliera lo menos posible para mantener unas buenas condiciones hidrodinámicas. El “balcón” está construido por laminas de acero del tipo V2A de 3mm de grosor. La mayor dificultad era determinar la distancia del objetivo detectado. Había un gran temor en utilizar dispositivos activos para este cometido y por eso se siguió investigando y desarrollando sistemas pasivos. Además del sistema “Felchen” que no estuvo listo antes de finalizar la contienda hubo otros proyectos:
|
Nota de U-Historia: Os recomendamos consultar el siguiente artículo para ampliar la información sobre el GHG: Algunos aspectos apenas conocidos del GHG, el aparato de escucha de los uboote |