-
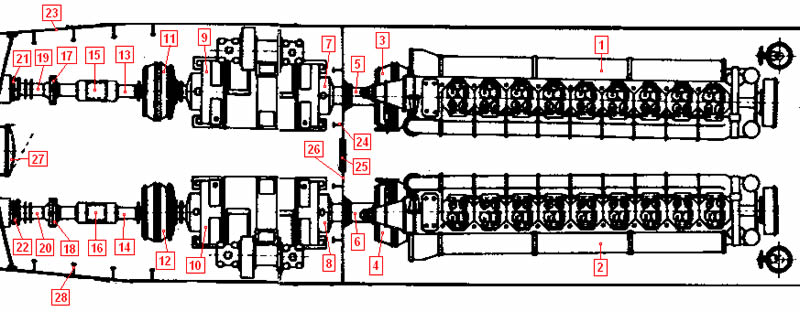
En superficie a velocidad máxima, los motores diesel (1 y 2) funcionando al máximo de revoluciones los embragues (3, 4 y 11, 12) embragados, los motores eléctricos (9 y 10) funcionando en vacio.
-
En superficie a baja velocidad, con uno de los motores funcionando, supongamos el de estribor, los embragues (4 y 12) embragados el motor eléctrico de estribor (10) trabaja como generador alimentando al motor eléctrico de babor (9) las baterias van desconectadas y el embrague (3) desembragado.
-
En superficie cargando baterías, ambos motores diesel (1 y 2) funcionando a un régimen intermedio de revoluciones los embragues (3, 4 y 11,12) embragados y ambos motores eléctricos (9 y 10) funcionando como generadores.
-
En superficie con uno de los motores funcionando, supongamos el de babor, los embragues (3 y 11) conectados, el submarino navega solo con ese motor y usa el de estribor (2) para cargar baterias para lo cual se embraga el embrague (4) que hace girar al motor eléctrico (10) excitado como generador, se desembraga el embrague, (12) la hélice de estribor no gira.
-
Navegando con Schnorkel idéntico a los trtes primeros casos expuestos.
-
Navegación sumergido se desembragan los embragues (3 y 4) de los motores diesel y se embragan los de los eléctricos (11 y 12) funcionan solo los motores eléctricos (9 y 10) alimentados por las baterías.
|